WYBÓR APARATURY.
Wybór aparatury do zdalnego sterowania modeli to jeden z pierwszych kroków, który na nas czeka na samym początku drogi pilota, czy też modelarza lotniczego. Proponuję przeczytać ten artykuł, zaznajomić się z typami nadajników, ich funkcjonalnością, budową.W internecie, na forach modelarskich, szajsbukach pytanie "co wybrać" pojawia się bardzo często. Mam nadzieję, że dzięki temu tekstowi uda mi się rozwiać niektóre wątpliwości i odpowiedzieć na kilka z tych pytań.
Aparatura RC – generalnie tym określeniem nazywamy system zdalnego sterowania modelem.
W skład systemu w uproszczeniu wchodzą elementy :
- nadajnik
- odbiornik
- serwomechanizmy ( regulatory )
- źródło zasilania
W artykule tym postanowiłem zająć się i opisać skrótowo i myślę, że w miarę przystępnie pierwszy element systemu,
czyli nadajniki. Generalnie nadajniki RC dzielimy na kilka rodzajów, a samych podziałów ze względu na różne kryteria też jest kilka.
czyli nadajniki. Generalnie nadajniki RC dzielimy na kilka rodzajów, a samych podziałów ze względu na różne kryteria też jest kilka.


... czasem nie łatwo jest oprzeć się pokusie bycia ... Bogiem ... Czas Apokalipsy
Aparatura kompaktowa.
Chyba najbardziej popularny typ nadajnika modelarskiego. Charakteryzuje się zwartą obudową, dostępem do wszystkich przełączników i manipulatorów nadajnika bez odrywania ręki. Praktycznie cały czas trzymana jest oburącz, wyposażona
w odpowiednią antypoślizgową powierzchnię spodu nadajnika, czy to w formie gumowych nakładek, czy też stosownego wyprofilowania i chropowatości tworzywa. Główne organy sterujący, czyli drążki obsługiwane są kciukami, kontrolery kanałów dodatkowych zazwyczaj pod palcami wskazującymi
z obu stron nadajnika.
w odpowiednią antypoślizgową powierzchnię spodu nadajnika, czy to w formie gumowych nakładek, czy też stosownego wyprofilowania i chropowatości tworzywa. Główne organy sterujący, czyli drążki obsługiwane są kciukami, kontrolery kanałów dodatkowych zazwyczaj pod palcami wskazującymi
z obu stron nadajnika.
Nadajniki kompaktowe przyjmują różne kształty, co widać na fotografii obok. Na dzień dzisiejszy większość z nich to zaawansowane "systemy komputerowe" wyposażone w odpowiedni interface. Oprogramowanie może być dedykowane
i związane z samym producentem ( Futaba, Jr, Hitec ).
Gro systemów umożliwia implementacje oprogramowania typu Open Source. Interface nadajnika to możliwość jego konfiguracji, ustawień itd. Mamy tutaj nadajniki z dotykowymi ekranami, klawiszami systemowymi obok wyświetlacza, pokrętłami itd. Same wyświetlacze zaś mogą być umieszczane w górnej części obudowy, lub na jej dole.
i związane z samym producentem ( Futaba, Jr, Hitec ).
Gro systemów umożliwia implementacje oprogramowania typu Open Source. Interface nadajnika to możliwość jego konfiguracji, ustawień itd. Mamy tutaj nadajniki z dotykowymi ekranami, klawiszami systemowymi obok wyświetlacza, pokrętłami itd. Same wyświetlacze zaś mogą być umieszczane w górnej części obudowy, lub na jej dole.

Nadajnik pulpitowy.
Drugim typem nadajników ze względu na popularność są nadajniki w obudowach typu pulpit. Sam nadajnik większy jest
od kompaktu i zazwyczaj dodatkowym wyposażeniem radia są szelki mocujące i stelaż pozwalający wygodnie radio zawiesić na szyi. Ręce oparte o nadajnik, główne drążki obsługiwane zarazem kciukami i palcami wskazującymi. Kanały dodatkowe zazwyczaj obsługiwane potencjometrami suwakowymi, dodatkowymi przyciskami.
Na fotografii obok leciwy już nadajnik firmy Graupner.
od kompaktu i zazwyczaj dodatkowym wyposażeniem radia są szelki mocujące i stelaż pozwalający wygodnie radio zawiesić na szyi. Ręce oparte o nadajnik, główne drążki obsługiwane zarazem kciukami i palcami wskazującymi. Kanały dodatkowe zazwyczaj obsługiwane potencjometrami suwakowymi, dodatkowymi przyciskami.
Na fotografii obok leciwy już nadajnik firmy Graupner.

Aparatura typu SMART.
Nowy typ nadajników, który pojawił się na rynku nie dawno. Bardzo mała zwarta obudowa przypominająca swym kształtem pad komputerowy. Promowana przez firmę MULTIPLEX.
Obsługiwana tak jak kompakt z pomocą kciuków. Dość kontrowersyjny pomysł moim zdaniem i przyznam że dla mnie nadajnik tego typu nie jest wygodny.
Być może związane jest to z jego małym ciężarem. Brak wyświetlacza, przez co programowanie odbywa się z pomocą komputera.

Aparatura pistoletowa.
Specyficzny typ nadajnika zazwyczaj
czterokanałowy stosowany głównie przez modelarzy samochodowych, gdzie drążek kierunku występuje w postaci kierownicy, a drążek gazu w postaci spustu. Do tego różne tryby pracy i możliwość wszelkich ustawień reakcji modelu samochodu.


Aparatura dedykowana.
To nadajniki przeznaczone do sterowania konkretnego modelu, zazwyczaj stanowią wyposażenie dronów itd. Na fotografii obok nadajnik firmy YUNEEC służący do pilotowania drona wyposażony w komplet anten nadawczych, anten odbiorczych toru video, duży wyświetlacz pokazujący obraz z kamery drona itd.
Generalnie pod względem użyteczności i sposobu obsługi nadajniki dzielimy na systemy proste o podstawowych funkcjach i nadajniki „komputerowe”, czyli wyposażone w odpowiednie oprogramowanie wewnętrzne pozwalające definiować sposób działania nadajnika, zmianę jego ustawień itd.
Pośrednim modelem pomiędzy nimi są nadajniki , które w celu przeprogramowania podpinamy pod komputer i z pomocą łącza przewodowego i odpowiedniego programu zmieniamy funkcjonalność nadajnika i jego ustawienia. Zarówno proste jak i skomputeryzowane nadajniki występują we wszystkich wyżej wymienionych typach obudów.
Programowanie odbywa się na kilka sposobów zależnie od producenta sprzętu. Może to być interfejs klawiszowy ( JR 3810 ),
rolkowy lub interfejs ekranu dotykowego ( AURORA , FUTABA na pierwszej fotografii ).
rolkowy lub interfejs ekranu dotykowego ( AURORA , FUTABA na pierwszej fotografii ).
Z lewej strony nadajnik "komputerowy" AURORA wyposażony
w komputer pozwalający na ustawienie wszelkich zmiennych parametrów obsługi serw takich jak DualRate, Exponential, wstępne ustawienie trymerów, zakresów wychyleń serw, krzywe skoku i gazu dla śmigłowców, reversy kanałów i pamięć modeli i wiele wiele innych. Z prawej strony bardzo prosty nadajnik sześciokanałowy śmigłowcowy z możliwością przełączania reversów serwomechanizmów i miksowania krzywej i giroskopu . Jest to typ nadajnika dla zupełnie początkujących z bardzo wieloma ograniczeniami praktycznie przypisane do jednego modelu śmigłowca - BELT CP
w komputer pozwalający na ustawienie wszelkich zmiennych parametrów obsługi serw takich jak DualRate, Exponential, wstępne ustawienie trymerów, zakresów wychyleń serw, krzywe skoku i gazu dla śmigłowców, reversy kanałów i pamięć modeli i wiele wiele innych. Z prawej strony bardzo prosty nadajnik sześciokanałowy śmigłowcowy z możliwością przełączania reversów serwomechanizmów i miksowania krzywej i giroskopu . Jest to typ nadajnika dla zupełnie początkujących z bardzo wieloma ograniczeniami praktycznie przypisane do jednego modelu śmigłowca - BELT CP

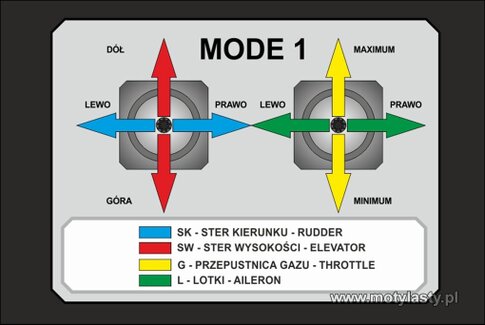
Układ drążków – MODE aparatury.
Każdy nadajnik pracuje w określonym MODZIE, to znaczy układzie drążków. Układ drążków, a właściwie ich przyporządkowanie do danych kanałów decyduje o sposobie kierowania modelem. Wybór układu jest jest jednym z ważniejszych wyborów w karierze pilota RC.
W początkowym stadium może się wydawać, że jest to sprawa mało istotna. Z biegiem czasu i nabywania praktyki pilot RC zaczyna działać „bezwarunkowo”, dochodzi pamięć motoryczna „palców”, reakcje odbywają się automatycznie. Jeśli ktoś nauczył się i lata w określonym MODZIE przejście na inny MOD zazwyczaj jest bardzo problematyczne.

MODE - 1
W układzie MODE-1 na lewym drążku mamy ster kierunku oraz ster wysokości. Lotki i gaz zaś umieszczone są na drążku prawym. Układ ten stosowany jest gównie w precyzyjnej akrobacji, gdzie lotki oddzielone od kierunku nie zakłócają się nawzajem, układ ten stosowany jest też często w kombacie, gdzie modele cały czas latają na maksymalnych obrotach. Układ przydatny w zawisach na śmigle, lewa ręka obsługuje całe usterzenie ogonowe, czyli kierunek i wysokość.
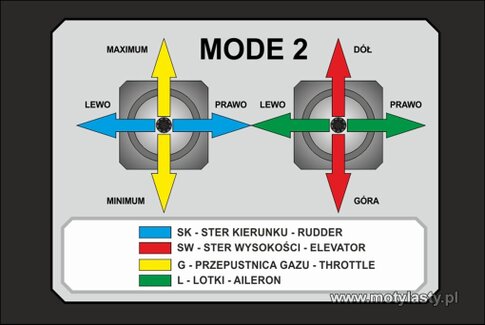
MODE -2
Mode ten najbardziej zbliżony jest do prawdziwego układu lotniczego. Na drążku prawym tak jak w samolocie mamy lotki i ster wysokości. Drążek lewy zaś jest namiastką orczyka i przepustnicy gazu. Układ ten doskonały jest w przypadku modeli śmigłowców. Prawa ręka obsługuje głowicę śmigłowca, zaś lewa silnik i śmigło ogonowe.
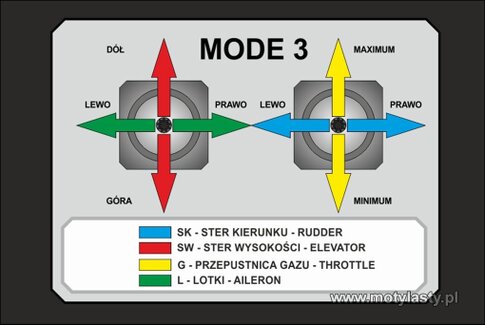
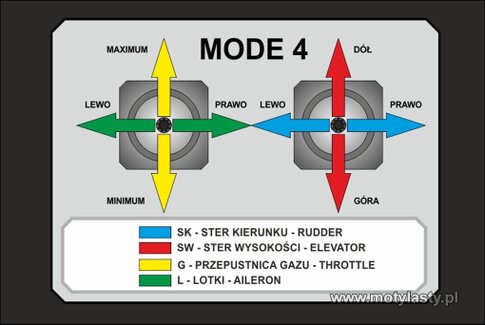
MODE 3 i MODE 4
Układy 3 i 4 to układy o mniejszej popularności.
Jaki układ wybrać, czym się kierować głównie w przypadku rozpoczynania kariery pilota RC ?.
Nie mam tutaj złotego środka i jedynej słusznej odpowiedzi. Może się okazać, że nauczyliśmy się latać w danym modzie mając jednak lepsze predyspozycje do latania w innym. Generalnie najlepiej jest nauczyć latać się w układzie takim, w jakim lata większość modelarzy na naszym lotnisku, w klubie czy też modelarni.
Szczególnie przydatne jest to przy oblotach nowego modelu, gdzie zawsze ktoś bardziej doświadczony będzie stał obok i w razie czego uratuje nas z opresji. Jeśli nie mamy tego komfortu i jesteś „samotnym wilkiem” sugeruje zacząć latać w modzie 1.
Zaobserwowałem, że początkujący i nowicjusze w tym modzie lepiej sobie radzą, latają równiej, ich lot jest znacznie spokojniejszy. Spowodowane jest to właśnie oddzieleniem drążków lotek i wysokości, pilot nie generuje sam sobie „zakłóceń”. Idealną sprawą byłoby wpierw polatać na symulatorze, spróbować obydwu MODÓW i przekonać się samemu, który układ jest nam „duchowo” bliższy, w którym czujemy się bardziej swobodnie. To samo tyczy pytania, jaką ogólnie aparaturę wybrać ?. Czy duży nadajnik pulpitowy, czy może lepiej nadajnik kompaktowy. Jedni latają doskonale na samych kciukach, inni zaś potrzebują dłuższych drążków i obydwu palców na każdym z nich. To jest tak jak z układem MODU. Można się „męczyć” kilka sezonów latając na pulpicie, aż nagle, zazwyczaj przypadkiem okazuję się, że obudowa kompaktowa i latanie na kciukach to jest właśnie to. Zwracam uwagę na jeszcze jadą rzecz, tyczącą głównie drążka steru wysokości nie zależnie od MODU.
Zaobserwowałem, że początkujący i nowicjusze w tym modzie lepiej sobie radzą, latają równiej, ich lot jest znacznie spokojniejszy. Spowodowane jest to właśnie oddzieleniem drążków lotek i wysokości, pilot nie generuje sam sobie „zakłóceń”. Idealną sprawą byłoby wpierw polatać na symulatorze, spróbować obydwu MODÓW i przekonać się samemu, który układ jest nam „duchowo” bliższy, w którym czujemy się bardziej swobodnie. To samo tyczy pytania, jaką ogólnie aparaturę wybrać ?. Czy duży nadajnik pulpitowy, czy może lepiej nadajnik kompaktowy. Jedni latają doskonale na samych kciukach, inni zaś potrzebują dłuższych drążków i obydwu palców na każdym z nich. To jest tak jak z układem MODU. Można się „męczyć” kilka sezonów latając na pulpicie, aż nagle, zazwyczaj przypadkiem okazuję się, że obudowa kompaktowa i latanie na kciukach to jest właśnie to. Zwracam uwagę na jeszcze jadą rzecz, tyczącą głównie drążka steru wysokości nie zależnie od MODU.
Zauważyłem, że niektórzy początkujący źle odczytują pokazane schematy i na odwrót podpinają serwo wysokości, to znaczy ruch drążka od siebie interpretują jako „góra” a ruch do siebie jako „dół”. Bierze się to stąd zazwyczaj, że patrzą na aparaturę ( a raczej schemat ) w układzie pionowym i logicznie w ich opinii ruch drążka w górę powinien spowodować lot modelu w górę. Nic bardziej błędnego, jeśli ktoś tak nauczył się latać to proponuję jak najszybciej zmienić przyzwyczajenia, zdarzy się że ktoś poprosi nas o oblot swojego modelu, czy też dostaniemy model do regulacji. Niby w tym samym co my MODZIE, a tu nagle taki SUPRAJS i tylko niepotrzebnie rozbijemy model. Proponuję, nie twórzmy kolejnych MODÓW :)
Trochę teorii - czyli częstotliwości pracy nadajników.
Jeszcze kilka lat temu kwestia częstotliwości i związany z tym wybór nadajnika był powiedzmy bardzo prosty. Istniał podział na częstotliwość 27 MHz, która zazwyczaj używana była w zabawkach i modelach kołowych, 35 MHz zarezerwowana dla tego wszystkiego co lata, 40 MHz dla modeli pływających i lądowych.
W ramach tych częstotliwości dobierało się do nadajnika i odbiornika odpowiednie pary kwarców, które definiowały nam kanał na którym nasze radio było używane. To zabezpieczało nas przed możliwością złapania zakłóceń z innego nadajnika lub zakłócenia swoim nadajnikiem innego odbiornika. Wymagało to pewnej uwagi, znajomości „środowiska” w którym się latało, gdzie środowiskiem określam innych modelarzy i ich systemy RC. Pojawiły się skanery częstotliwości, systemy bezkwarcowe, w których można było wybrać wolny kanał. W końcu pojawiły się radia, które stały się niejako „bardziej bezpieczne”, a to wszystko za sprawa przyjęcia się techniki nadawania tak zwanym rozproszonym widmem.
Jest to zupełna odwrotność dotychczasowej techniki wąskopasmowej. Swoje powstanie datuje na lata 40-ste ubiegłego wieku. Autorami wynalazku była para artystów, aktorka Hedy Lamarr i kompozytor George Anthell.
Ta para stworzyła podwaliny pod nową technikę łączności uzyskawszy na swój wynalazek patent nr 2292387. Złamali w swej powiedzmy „nie wiedzy” jeden z fundamentów łączności, który mówił, że w systemach nadawczo-odbiorczych częstotliwość fali nośnej jest nie zmienna. Na tej zasadzie działają systemy 27, 35, 40 MHz etc
Zastosowali mechanizm zmiany częstotliwości w czasie, gdzie przeskoki częstotliwości nie były przypadkowe, a sterowane odpowiednim programem, czy też sekwencją zarówno w nadajniku, jak i odbiorniku. Zabezpieczało to całość przed zakłóceniami z innej strony i nazwane zostało skrótem SS ( Spread Spectrum ).
Obecnie wszystkie systemy łączności pracujące w pasmach 2,4 lub 5 GHz są systemami SS, tyczy to systemów telefonii komórkowej, systemów WiFi itd.
Do tej pory nie ukształtował się jeden ogólny system 2,4 dla modelarzy. Ile firm produkujących nadajniki, tyle różnych systemów 2,4.
Istnieją systemy :
Istnieją systemy :
- FHSS ( Fast Hopping Spread Spectrum ) z szybkim kluczowaniem ( zmianą ) częstotliwości,
- DSSS ( Direct Sequence Spread Spectrum ) stosowany przez firmy Spectrum i JR, gdzie dane są dodatkowo kodowane, określany też mianem DSM i DSM-II
- FASST ( Futaba Adaptive Spread System Technology ) firmy Futaba opartej o dwie anteny odbiorcze.
- AFHSS ( Advanced Frequency Hopping Spread Spectrum )stosowany przez firmę Hitec
Główną zaletą systemów 2,4 jest nie wrażliwość na zakłócenia, każdy odbiornik jest zbindowany ( przypisany ) do danego nadajnika i nie odbiera i nie dekoduje sygnałów innego radia, nawet tego samego producenta i typu. Możliwość uzyskania z odbiornika sygnału zwrotnego ( odbiornik może pracować również jako nadajnik ) i tym sposobem monitorowania różnych parametrów modelu takich jak poziom zasilania odbiornika, poziom paliwa w baku modelu. Wszystko to oczywiście z użyciem odpowiednich czujników.
Wady systemów 2,4 to głównie wrażliwość na poziom zasilania, w przypadku chwilowej utraty zasilania lub przekroczenia dolnej wartości progu następuje proces resetowania odbiornika. Proces ten może doprowadzić do utraty kontroli nad modelem i jego utratę lub rozbicie. Inna sprawa to kwestia anten systemów 2,4. Antena odbiorcza ( lub anteny zależnie od systemu ) są bardzo krótkie. 2,5 cm. W związku z powyższym może się zdarzyć, że sama antena w trakcie lotu zostanie przysłonięta w całości przez inny element metalowy modelu, np. taki jak cylinder silnika, co może doprowadzić do zaniku lub utraty łączności w tym momencie. Sam system nadawania może być z góry przypisany przez producenta, zabudowany w nadajniku i nie zmienny. Może też być w dowolnym momencie wymieniany. Tyczy to nadajników, w których możemy wyjąc sam moduł nadawczy i wymienić na zupełnie inny.
Sam system nadawania może być z góry przypisany przez producenta, zabudowany w nadajniku i nie zmienny. Może też być w dowolnym momencie wymieniany. Tyczy to nadajników,
w których możemy wyjąc sam moduł nadawczy i wymienić na zupełnie inny. Klasą samą w sobie są nadajniki multisystemowe, których przykładem jest RADIOMASTER. Moduł nadawczy tego nadajnika obsługuje przeszło 40 znanych protokołów, czyli możemy go zbindować praktycznie z odbiornikiem dowolnego producenta. Dodatkowo nadajnik ten umożliwia fizyczną instalację drugiego modułu nadawczego. O nadajniku tym pisałem na swoim blogu.
w których możemy wyjąc sam moduł nadawczy i wymienić na zupełnie inny. Klasą samą w sobie są nadajniki multisystemowe, których przykładem jest RADIOMASTER. Moduł nadawczy tego nadajnika obsługuje przeszło 40 znanych protokołów, czyli możemy go zbindować praktycznie z odbiornikiem dowolnego producenta. Dodatkowo nadajnik ten umożliwia fizyczną instalację drugiego modułu nadawczego. O nadajniku tym pisałem na swoim blogu.

Zasilanie nadajników.
Niektóre nadajniki wyposażone są w koszyczki, w które wkładamy baterie lub akumulatorki paluszkowe. Doświadczenie mówi, że te właśnie koszyczki stają się często powodem awarii. Dzieje się to za sprawą dużej ilości miejsc ( styków ) w których właśnie może dojść do przerwy w zasilaniu.
Baterii pozbywamy się na samym wstępie.
Koszyk zastępujemy polutowanym pakietem z akumulatorów, lub wymieniamy na pakiet LiPo. To działanie znacznie zwiększa niezawodność nadajnika i zarazem wpływa na bezpieczeństwo. O ile w przypadku modeli kołowych, utrata zasilania, zasięgu nie grozi aż tak wielkimi konsekwencjami, o tyle w przypadku modelu latającego konsekwencje mogą być nawet tragiczne.

SYMULATORY
Pisząc o nadajnikach nie sposób nie wspomnieć o symulatorach RC. Symulatory nie są nowym wynalazkiem ostatnich lat, a sięgają już ery komputerów pracujących w systemie DOS. Pierwsze jeszcze graficznie mało doskonałe mieszczące się dosłownie na jednej dyskietce już pozwalały zapoznać się z aspektami sterowania modelami latającymi i nie tylko. Czy można się nauczyć latania na samym symulatorze ?. Trudno mi odpowiedzieć, wszak ”latanie” na monitorze a latanie w realu to zupełnie różne rzeczy.
Więc czego symulator uczy, o ile jest w stanie czegokolwiek nauczyć ?. Wszak symulator niezależnie od klasy, jakości grafiki i odwzorowania to tylko namiastka. Jest jednak doskonałym narzędziem, które pozwala adeptowi modelarstwa zapoznać się z samym „procesem lotu” od startu do lądowania, pozwala nam wreszcie sprawdzić i przekonać się w jakim MODZIE najlepiej się czujemy i co najważniejsze uczy nas naszych odruchów i zachowania się modelu w zmiennych stanach lotu. Jest też doskonałym narzędziem treningowym w momencie, gdy z racji aury, czy też pory roku latanie tradycyjne nie wchodzi w grę.
Na symulatorze można doskonale ćwiczyć program akrobacji, daje nam fantastyczną możliwość przetrenowania figur, których na co dzień się boimy, czyli niskich przelotów plecowych, latania nożowego, zawisu na śmigle. Gro symulatorów pozwala nam przedefiniować dane modelu, zmienić w nim położenie środka ciężkości dając nam możliwość sprawdzenia zachowania takiego modelu.
Szczególnie przydatny jest dla pilotów modeli śmigłowców znacznie redukując koszty wejścia w te tematykę.

Po około 30-stu godzinach treningu na symulatorze zazwyczaj można już wykonać zupełnie prawidłowy zawis i pierwsze przeloty.
Obok symulator FMS z dedykowanym nadajnikiem firmy ESKY podpinanym pod port USB komputera.Jako ciekawostka z lewej strony opakowanie jednego z pierwszych symulatorów PC. Jest to program CSM firmy Simprop Electronic z roku 1993. Toporna grafika , wszystko na jednej dyskietce. Pozwalał jednak podpiąć się poprzez port drukarki do praktycznie dowolnego nadajnika i posiadał w sobie fenomenalny w mojej opinii sam model, a raczej algorytm lotu doskonale odwzorowujący fizykę i aerodynamikę modeli.
Funkcjonalność aparatury.
Funkcjonalność systemu sterowania definiowana jest w znacznej mierze przez nadajnik.
W przypadku prostych nadajników nie komputerowych praktycznie jest ona ograniczona, w związku czym spada na nas obowiązek przeprowadzania wszelkich regulacji sterów, lotek na poziomie samego modelu poprzez odpowiednie usytuowanie serw, dobór długości popychaczy etc. Oczywiście czynności te również wykonujemy w modelu „skomputeryzowanym”, ale tutaj mamy już znacznie większe możliwości za sprawą wbudowanych w nadajnik mikserów. W przypadku prostych aparatur jedyna praktycznie dana nam możliwość
to ustawienie reversu serw i czasami jakiś wbudowany mikser w modelach śmigłowców z dedykowanymi nadajnikami.
to ustawienie reversu serw i czasami jakiś wbudowany mikser w modelach śmigłowców z dedykowanymi nadajnikami.
W nadajnikach komputerowych spotykamy następujące miksery pozwalające na poprawne ustawienie modelu :
- Servo rewers – funkcja pozwalająca na zmianę kierunku serw dla poszczególnych kanałów. Czasami nie mamy możliwości ustawienia serwa w innym położeniu, czy też przestawienia samego jego orczyka. Odwrotne działanie uzyskujemy właśnie poprzez ustawienie tego miksera.
- Sub Trim – prócz tradycyjnych trymerów w nadajniku mikser ten pozwala nam wstępnie wytrymować poszczególne powierzchnie sterowe. Gniazdo orczyka serwa zazwyczaj oparte jest o wieloklin, więc nie jesteśmy w stanie na poziomie mechanicznym dokładnie ustawić położenia orczyka serwomechanizmu. Temu właśnie służy ten mikser. Pozwala na dokładne ustawienie serwa
w pozycji neutralnej, bez względu na ustawienie normalnych trymerów. - Travel Adjust – funkcja ta zmienia zakres ruchu serwa w dowolnym jego kierunku pozwalając nam na ograniczenie jego ruchu inaczej mówiąc jego kąta wychylenia. Przydatna w momentach gdy z racji ciasnoty w modelu musimy właśnie ograniczyć ruch orczyka, tak by nie wadził o inny element modelu, lub ograniczyć wychylenia powierzchni sterowych na mniejsze.
Nie regulujemy wychyleń w sposób mechaniczny poprzez dobór długości popychaczy, a robimy to właśnie na poziomie samego nadajnika.
Miksery pilotażowe, czyli miksery związane z preferencjami typowo pilotażowymi :
- Dula Rate – możliwość zmian zakresu wychyleń serwa w dowolnym momencie zmieniana dodatkowym przełącznikiem.
W zakresie tego miksera mamy możliwość ustawień powiedzmy faz lotu, gdzie w jednej fazie potrzebne nam są małe wychylenia lotek, a w innej wychylenia maksymalne. Same zakresy ustawiamy procentowo. Funkcja ta może być aktywna dla dowolnego kanału ( powierzchni sterowej ). Zazwyczaj każdy kanał ma doprecyzowany lub konfigurowalny przełącznik, który tę funkcję nam reguluje. - Exponential – funkcja ta reguluje odwzorowanie ruchy serwa na ruch drążka. W normalnym układzie serwo w sposób liniowy podąża za ruchem drążka, czyli wychylenia drążka o kąt 20 stopni powoduje takie samo wychylenie orczyka serwa. W przypadku tego miksera możemy ustawić nadajnik w ten sposób, że ruch drążka w zakresie powiedzmy 50 procent wychyłu powoduje jedynie wychył serwa o 10 procent. Po czym pod sam koniec ruchu drążka następuje gwałtowniejsze wychylenie serwa. W ten sposób mamy możliwość poprawienia precyzji sterowania w zakresie małych wychyłów nie rezygnując jednak z wychyłów pełnych.
Czyli generalnie mikser ten powoduje nie liniowy, a logarytmiczny ruch serwa w odpowiedzi na ruch drążka.
Miksery wielokanałowe – są to miksery dzięki którym mamy możliwość sterowania, a raczej wpływania na działanie serwa w dwóch lub większej ilości kanałów sterowniczych. Definiujemy je już na poziomie wstępnych ustawień typu modelu w nadajniku. Np w przypadku modelu szybowca z usterzeniem Rudlickiego mikser ten powoduje że w momencie wychyłu drążka steru wysokości obie powierzchnie usterzenia wychylają się w tą samą stronę, natomiast użycie drążka steru kierunku powoduje przeciwległe wychylenie
sterów usterzenia. System klapolotek modelu bezogonowca działa na tej samej zasadzie.
Istnieją też miksery, których zadaniem jest ułatwienie pilotowi procesu sterowania.
W grupie tych mikserów możemy wymienić następujące :
- Diferencjal – mikser ten pozwala nam na uzyskanie różnicowego wychylenia lotek, szczególnie przydatny w modelach szybowców, gdzie lotka idąca w górę powinna mieć większe wychylenie od lotki idącej w dół. Mikser ten pozwala nam na ustawienie procentowych różnic tych wychyleń.
- Aileron – Rudder – mikser ten powoduje wychylenie steru kierunku w momencie wychylenia lotek, czyli wpływa na jakość zakrętu
i powoduje, ze model „nie ciągnie ogona”. Oczywiście by to zrealizować w locie wystarczy z lotkami również wychylić ster kierunku, mikser ten jednak nas od tego zwalnia i robi to automatycznie poprzez zdefiniowanie procentowe stosunku wychylenia kierunku
do lotek. - Elevator-Flap – zadaniem tego miksera jest skorygowanie położenia steru wysokości w momencie wychylenia klap do lądowania. W momencie gdy wychylamy klapy zmienia się moment pochylający modelu, mikser ten powoduje dodatkowe wychylenie steru wysokości kompensujące moment pochylający.
- Snap-Roll – mikser ułatwiający wykonanie tej figury akrobacyjnej powodujący dodanie do ruchy serw lotek dodatkowe wychylenie kierunku i wysokości.
Miksery dodatkowe konfigurowalne. Realizują funkcję nie dostępne na poziomie programowania samego modelu lub jego typu. Przykładem może być model latającego skrzydła z systemem sterowania wyporowego, gdzie każda lotka sterowana jest dwoma serwami, serwo górne wychylające górną część lotki i dolne odpowiedzialne za powierzchnię dolną. Odpowiednie zmiksowanie tych serw pozwala nam na uzyskanie funkcji takiej, gdzie obie powierzchnie sterowe lotki działają w sposób normalny. Czyli wychylają się jednocześnie w górę lub w dół ( jak normalna lotka sterowana jednym serwem ), lub też otwierają się realizując funkcję hamulca. Ewentualnie lotka górnej powierzchni wychyla się w górę, natomiast lotka powierzchni dolnej pozostaje w swoim neutralnym położeniu. Innym przykładem zastosowania takowego miksera jest model kaczki w którym za pomocą dodatkowego kanału sterujemy wychyleniami samego silnika. Mamy możliwość domiksowania wychyłu silnika do steru wysokości uzyskując w ten sposób tak zwane wektorowanie ciągu.
Sam proces programowania i ustawienia mikserów zależny jest od typu aparatury. Istnieją systemy które z góry narzucają nam konfigurację modelu, np. w systemie JR kanał 1 to silnik lub hamulec w układzie glider, kanał 2 i 5 to lotki, kanał 3 to ster wysokości, kanał 4 to ster kierunku. W układzie Acro lotki już definiowane są przez kanały 2 i 6 . W innych aparaturach ( Aurora, Taranis, Radiomaster ) mamy możliwość dowolnego przyporządkowania kanału do serwa, dowolnego przyporządkowania danego przełącznika do funkcji, które ma on realizować w danym momencie.
Jaką aparaturę w takim razie wybrać na początek ?
Pytanie to często zadawane jest przez nowych adeptów modelarstwa. Odpowiem krótko, po pierwsze aparatura narzuca nam używanie pewnego systemu głównie w przypadku transmisji 2,4 GHz, czyli kupując Futabę jesteśmy skazani na odbiorniki Futaby, no chyba,
że wybierzemy aparaturę multisystemową, jak np RADIOMASTER, FrySky lub coś podobnego.
że wybierzemy aparaturę multisystemową, jak np RADIOMASTER, FrySky lub coś podobnego.
Po drugie, kupujemy aparaturę z komputerem. Nie ma sensu już bawić się w proste nadajniki z podstawowymi funkcjami, po co utrudniać sobie życie. Po trzecie kupujemy aparaturę która już „się zadomowiła” na rynku modelarskim, jest popularna,
znana i sprawdzona. Eksperymenty pozostawmy lepszym od siebie. I wreszcie po trzecie, kupujemy najlepszą aparaturę na jaką nas stać. Oczywiście to wszystko już po wyborze typu nadajnika, czy ma to być pulpit, czy kompakt , czy ma mieć MODE-1 czy może MODE-2.
znana i sprawdzona. Eksperymenty pozostawmy lepszym od siebie. I wreszcie po trzecie, kupujemy najlepszą aparaturę na jaką nas stać. Oczywiście to wszystko już po wyborze typu nadajnika, czy ma to być pulpit, czy kompakt , czy ma mieć MODE-1 czy może MODE-2.